")
Sadržaj:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:06.
- Zadnja izmjena 2025-01-23 14:37.



Zdravo momci..
Jeste li ikada odlutali napraviti labirintnu ploču kojom se može upravljati s vašeg Android pametnog telefona …!!
Pa na pravom ste mjestu. Napravio sam jedan za sebe koristeći Arduino i android.
Ne brinite, lako je.. U ovom projektu ću vam pokazati kako napraviti:
1. Lavirint ploča (napravio sam je od starih drvenih kutija koje su ležale okolo).
2. Android aplikacija u izumitelju aplikacija za kontrolu ploče.
3. Pisanje programa u Arduinu za kontrolu odbora i
4. Postavljanje kola….
Kasnije možete koristiti koncept naučen u drugim projektima koje ćete izgraditi.
Dakle, bez gubljenja vremena, počnimo….!
Korak 1: Skupljanje komponenti



Za ovaj projekat trebat će vam sljedeće stavke:
1. Dva servo motora (koristio sam mini i radili su za mene).
2. Arduino Uno. (Predlažem da ga kupite od snapdeala, njegov je klon, ali vrijedi svakog novčića koji sam potrošio)
3. Bluetooth modul.
4. Breadboard.
5. Neke kratkospojne žice
6. Tanke drvene ili tvrde ploče
7. ekseri, neki ključevi sa starih tastatura
8. Termokol (polistiren)
Korak 2: Izrada labirintne ploče



Ovo je mehanički dio projekta.
Prvo za podlogu uzmite dugačak pravokutni komad drvene daske ili kartona. mora biti veća od stvarne nagibne ploče..
Izrežite dva mala, jednake veličine kockastog drva..
i svakom dodajte po jedan ekser, tako da budu alinski na istoj visini od baze. Izrežite i dodatni komad drveta kako biste ga dodali kao oslonac stupovima.
sad za gornju ploču..
napravite okvir manji od baze, to će biti naša x os, na vanjskoj strani manjih rubova okvira napravite male rupe točno u sredini rubova. prerežite šipke na pola i zalijepite ih za velike rubove okvira okrenute prema unutra. pre toga ih prepolovite.
ovo će gornju ploču držati za okvir i pomoći će u rotaciji.
sada dodajte stupove vanjskim rupama kako bi okvir stajao na bazi.
zalijepite stupove na podlogu i na njih pričvrstite nosače.
sada za dodavanje servo motora.
jedan će biti pričvršćen za bazu i pričvršćen za okvir pomoću male šipke za okretanje okvira
drugi će biti pričvršćen na okvir i bit će pričvršćen na gornju ploču pomoću male šipke za okretanje gornje ploče.
servomotori trebaju biti postavljeni okomito jedan na drugi kako je prikazano na slikama.
sada je ploča spremna.
labirint sam napravio pomoću termokola i kartonske ploče.
Korak 3: Postavljanje kruga

Postavite krug kao što je prikazano na slici…
Zapamtite da za servomotore koristim crvenu žicu pozitivnu, smeđu negativnu i narančastu signal.
Bluetooth modul
Rx ide na pin 1
Tx ide na pin 0
Signalna žica osnovnog servo servera ide na pin 5
Signalna žica servo servera okvira ide na pin 6
Ne zaboravite dodati dodatno napajanje za servo i bluetooth modul. Drugi mudri modul neće dobiti dovoljno struje i nastavit će se prekidati, prikazujući grešku 516. Imao sam mnogo problema u rješavanju problema i na kraju sam shvatio problem i rješenje.
Korak 4: Izrada aplikacije


U redu, prije svega morate se prijaviti u mit inventor aplikacije za izradu bilo kojih aplikacija.
idite na
i kliknite na Kreiraj aplikaciju! koji se u gornjem desnom kutu prijavite, i spremni ste za rad….
Sve ostalo što sam pokazao u videu.. pogledajte.
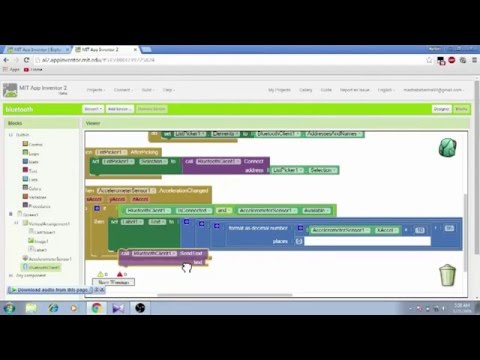
evo osnovnih:
kada se zaslon inicijalizira u aplikaciji (što je u ovom slučaju Screen1), -sensor akcelerometra je omogućen i osjetljivost je postavljena na max tj. 3.
sada kada pritisnemo birač lista
-pojavljuje se lista s popisom uparenih uređaja.
(Morat ćete upariti modul prije otvaranja aplikacije, jer je uobičajeni kôd za par 1234)
Sada prije odabira birača popisa, -postavi spisak uparenih uređaja i njihove adrese
Nakon što odaberete uređaj
-Bluetooth adapter će se povezati s odabranim uređajem
Sada je modul povezan
Sada kada su promijenjeni podaci senzora aklerometra
-Dodajte podatke u tekst naljepnice i pošaljite ih sa bluetooth send.
Sada lukavi dio šalje dva podataka odjednom
# podaci aklerometra kreću se od 0 do 9,5 kada je nagnut ulijevo i 0 do -9,5 kada je nagnut udesno, isto vrijedi i kada je telefon nagnut prema dolje i prema gore..
tako da imamo podatke o nagibanju osi x i y koje moramo poslati …
neka podaci osi x budu X, a osi Y Y
pa ono što sam uradio je ovo:
Tekst = "(X*10 (uklonite decimalne zapete nakon toga) +95)*1000 (pomnožite s 1000)+Y*10 (uklonite decimalne zapete) +95"
tako da se sada podaci kreću od 0 do 190 za svaku os i dodaju se tako da čine 190180 gdje su prve 3 znamenke osi x, a posljednje 3 koordinate osi y …
koji će biti poslan na bluetooth modul i bit će razbijen na stvarne podatke i mapu sa kutovima rotacije servo u arduino kodu …
Korak 5: Pisanje Arduino koda


Nakon što se aplikacija dovrši, počnimo s kodom koji sam učitao, preuzmite ga, sastavite i pošaljite na arduino, ali pričekajte prije nego što pošaljete kod, odvojite rx i tx pinove bluettoh modula s arduino ploče.. i pošaljite kôd nakon toga možete pričvrstiti igle nazad..
kôd koji se prima s bluetootha je niz koji sadrži naše podatke o osi.
sada Serial.parseInt (); koristi se za čitanje niza i pretvaranje niza u int u varijabli poz.
sada poz ima vrijednost = 190180 (recimo) naš cilj je sada dešifrirati podatke, tj. ukloniti x os i y koordinate
za os x. podijelite vrijednost s 1000, to će dati 190. tj. vrijednost/1000 = 190
a za os y modularno podijelite vrijednost sa 1000, što će nam dati 180, tj. vrijednost%1000 = 180
sada izračunajte maksimalnu i minimalnu poziciju servomotora koje želite za naginjanje ploče, … u mom slučaju njene 180 i 75 i ….
sada imamo koordiniranu os x i y, sada samo moramo mapirati koordinate s minimalnim i maksimalnim kutovima rotacije koje želimo za naše servo sisteme ….
za detalje pogledajte kôd.
I završili smo … učitajte kôd, otvorite aplikaciju povežite se i igrajte….
Znate li da je Google napravio jedan za sebe i da je to veliki lavirint koji ste ikada vidjeli … što je i moja motivacija da ga napravim za sebe.
Zato se do sljedećeg puta zabavite..
Preporučuje se:
DIY 37 Leds Arduino Roulette igra: 3 koraka (sa slikama)
")
DIY 37 Leds Arduino Roulette igra: Roulette je casino igra nazvana po francuskoj riječi koja znači mali kotačić
Arduino Sorta Sudoku igra: 3 koraka (sa slikama)
")
Arduino Sorta Sudoku igra: Mnogi ljudi vole igrati Sudoku, a unuci vole igre pogađanja pa sam odlučio napraviti prijenosnu igru „Sorta Sudoku“. U mojoj verziji igra je 4x4, ali je naveden samo jedan broj. Ideja je pogoditi ostatak brojeva u
Pritisnite (dugme); // Arduino LCD igra: 5 koraka (sa slikama)
; // Arduino LCD igra: 5 koraka (sa slikama)")
Pritisnite (dugme); // Arduino LCD igra: Nedavno sam u izviđačima radio na znački zasluga za dizajn igre. Za jedan od zahtjeva, napravio sam ovu igru koristeći Arduino koji se temelji na LED Rocker igri. Poanta igre je postići najveći mogući broj bodova. Na početku t
Arduino Wire igra: 7 koraka (sa slikama)
")
Arduino Wire Game: Za ovaj projekt, referencirao sam ga s ove web stranice i promijenio ga da napravim novi projekt. Ovaj projekt se zove Wire Game, gdje ćete uzeti metalnu ručku i proći kroz žicu bez dodirivanja žice. Ako ručka dodirne žicu
Arduino Touch Tic Tac Toe igra: 6 koraka (sa slikama)
")
Arduino Touch Tic Tac Toe igra: Dragi prijatelji, dobrodošli u još jedan Arduino vodič! U ovom detaljnom vodiču napravit ćemo igru Arduino Tic Tac Toe. Kao što vidite, koristimo ekran osjetljiv na dodir i igramo se protiv računara. Jednostavna igra poput Tic Tac Toe je